|
Creates eight Dissimilarity objects that bear names "1" ... "8".
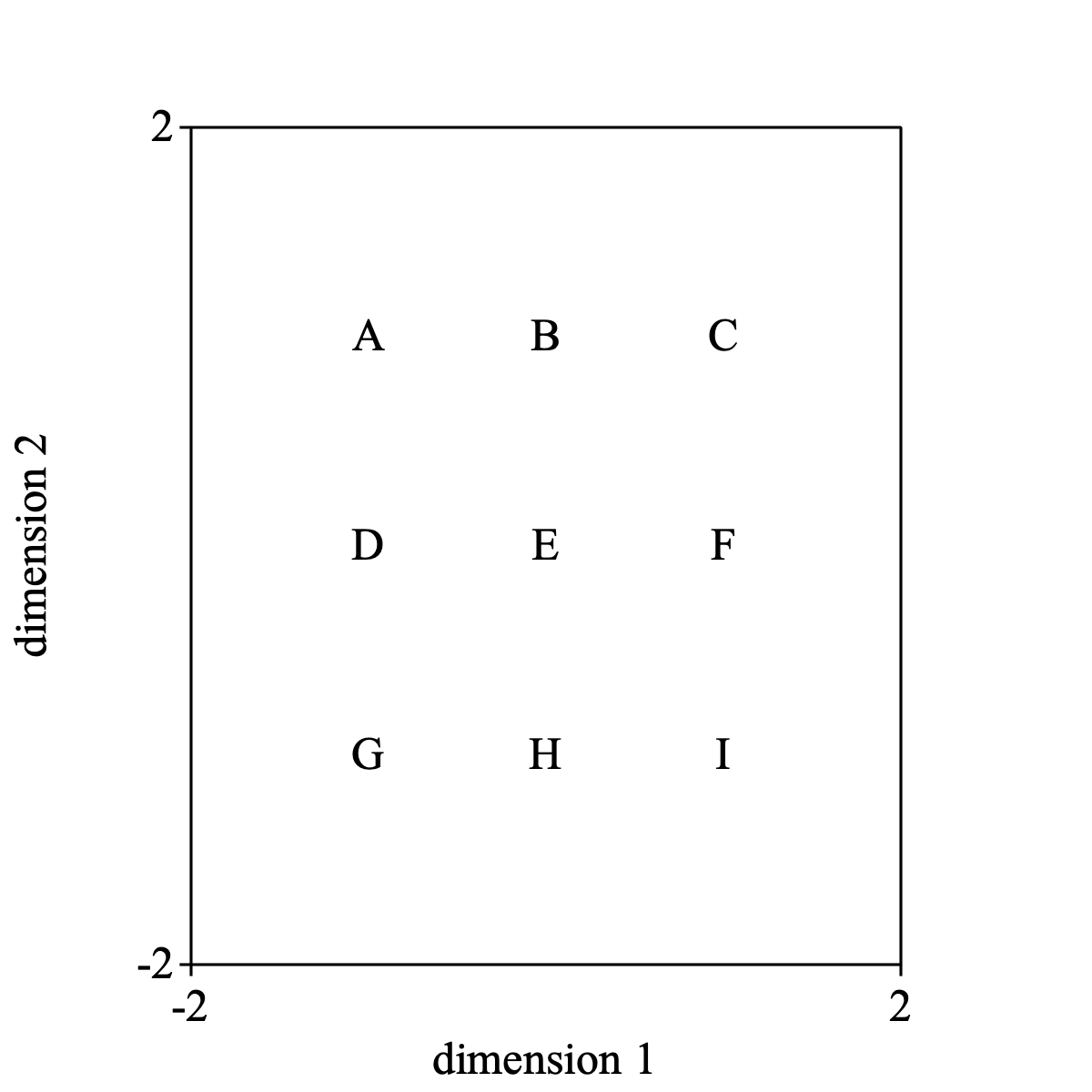
These objects contain the interpoint distances for a twodimensional 3×3 Configuration of points, labelled A, B, C, ... I. All Dissimilarity objects are based on the following underlying configuration.
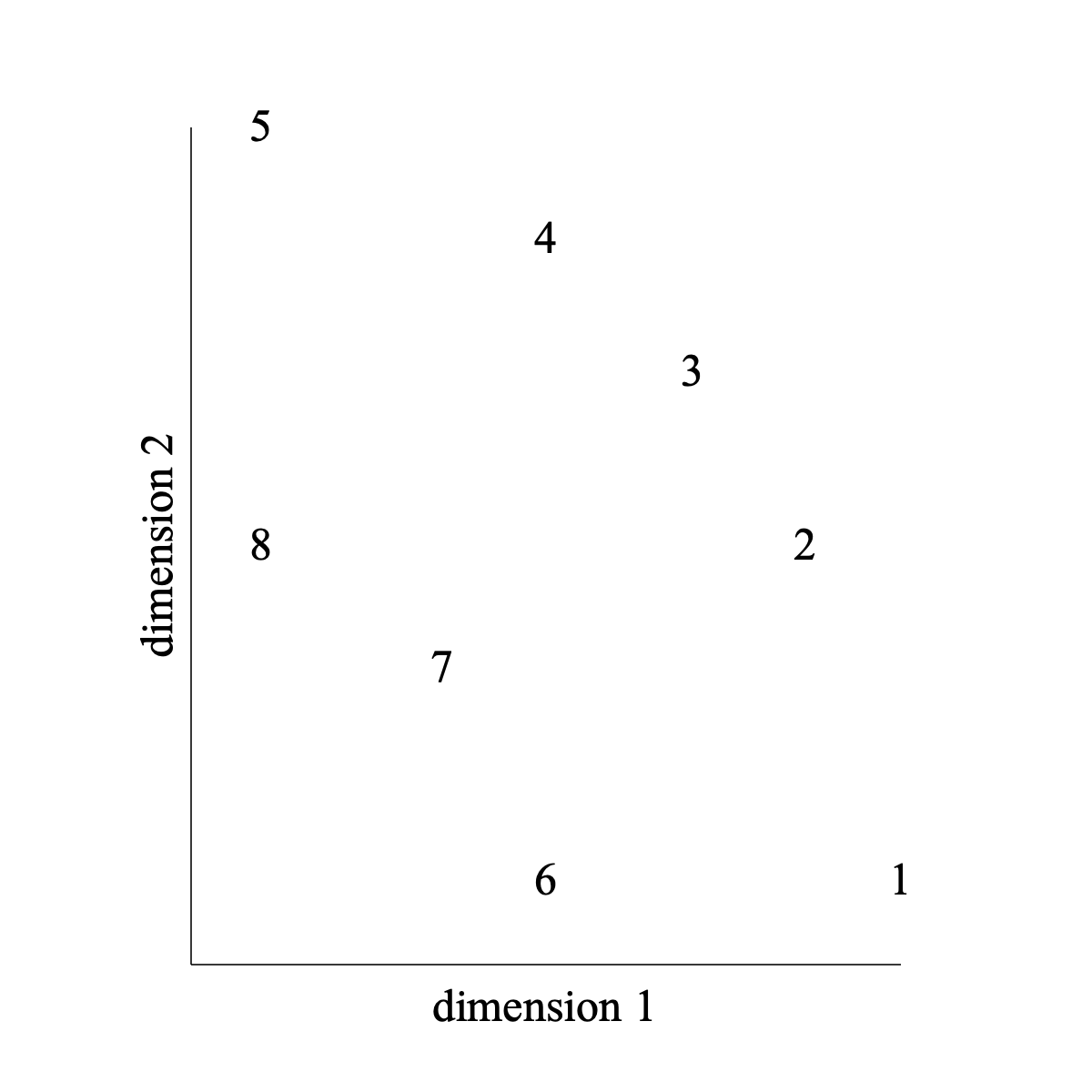
The eight sources weigh this configuration in the following manner:
For each source, the distances were subjected to the transformation:
| dissimilarityij = distanceij + noiseRange · u, |
where u is a uniform random variable between 0 and 1.
Now you can do the following for example:
This example was adapted from Carroll & Wish (1974).
© djmw 19971201